Abstract
In increasingly digitized working and living environments, human-robot collaboration is growing fast with human trust towards robotic collaboration as a key factor for the innovative teamwork to succeed.
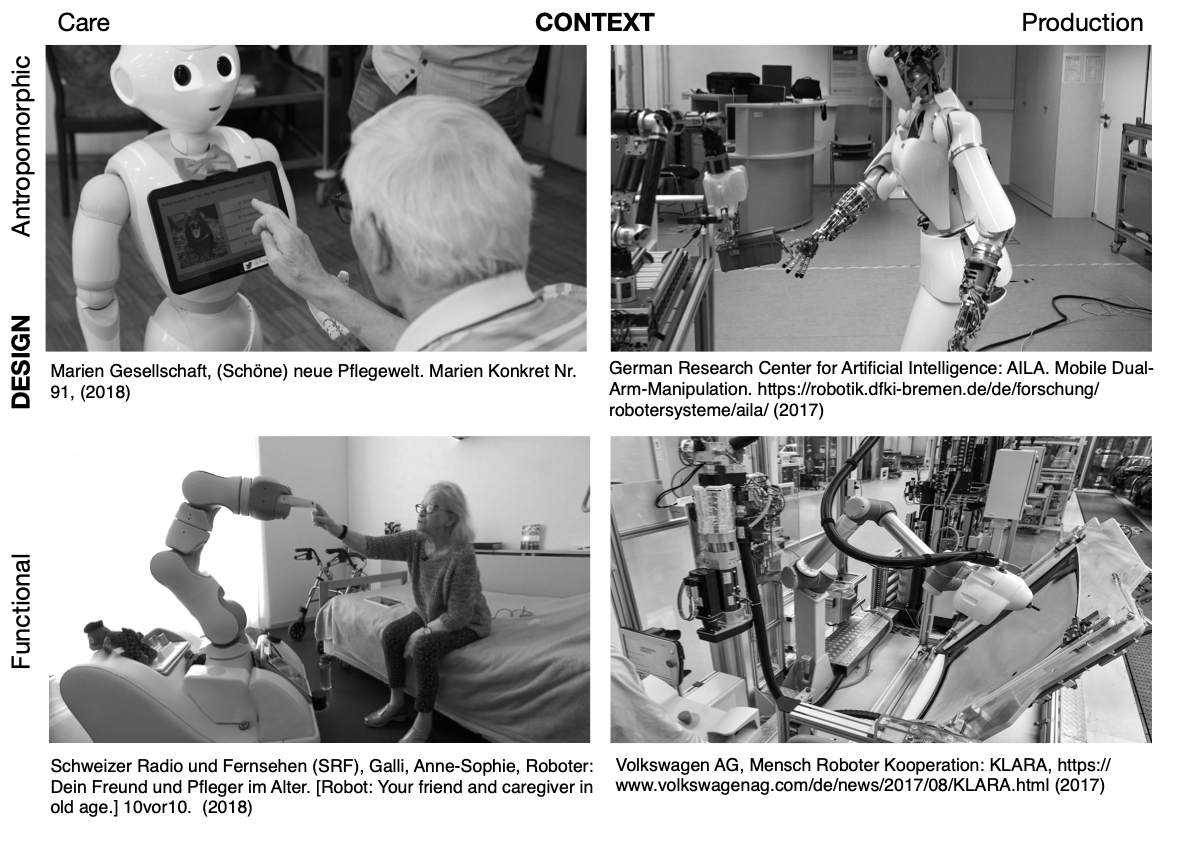
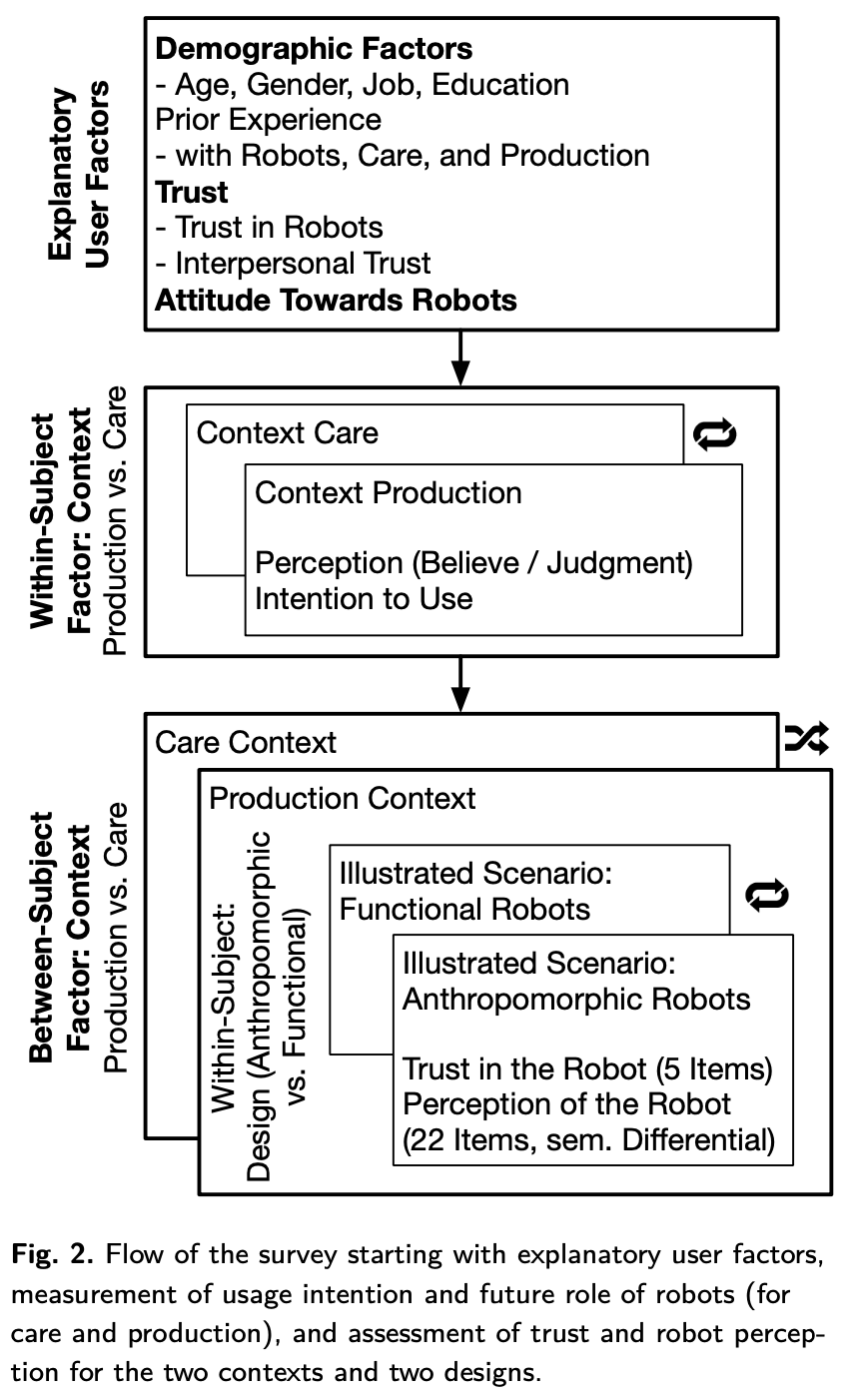
This article explores the impact of design factors of the robotic interface (anthropomorphic vs. functional) and usage context (production vs. care) on human-robot trust and attributions.
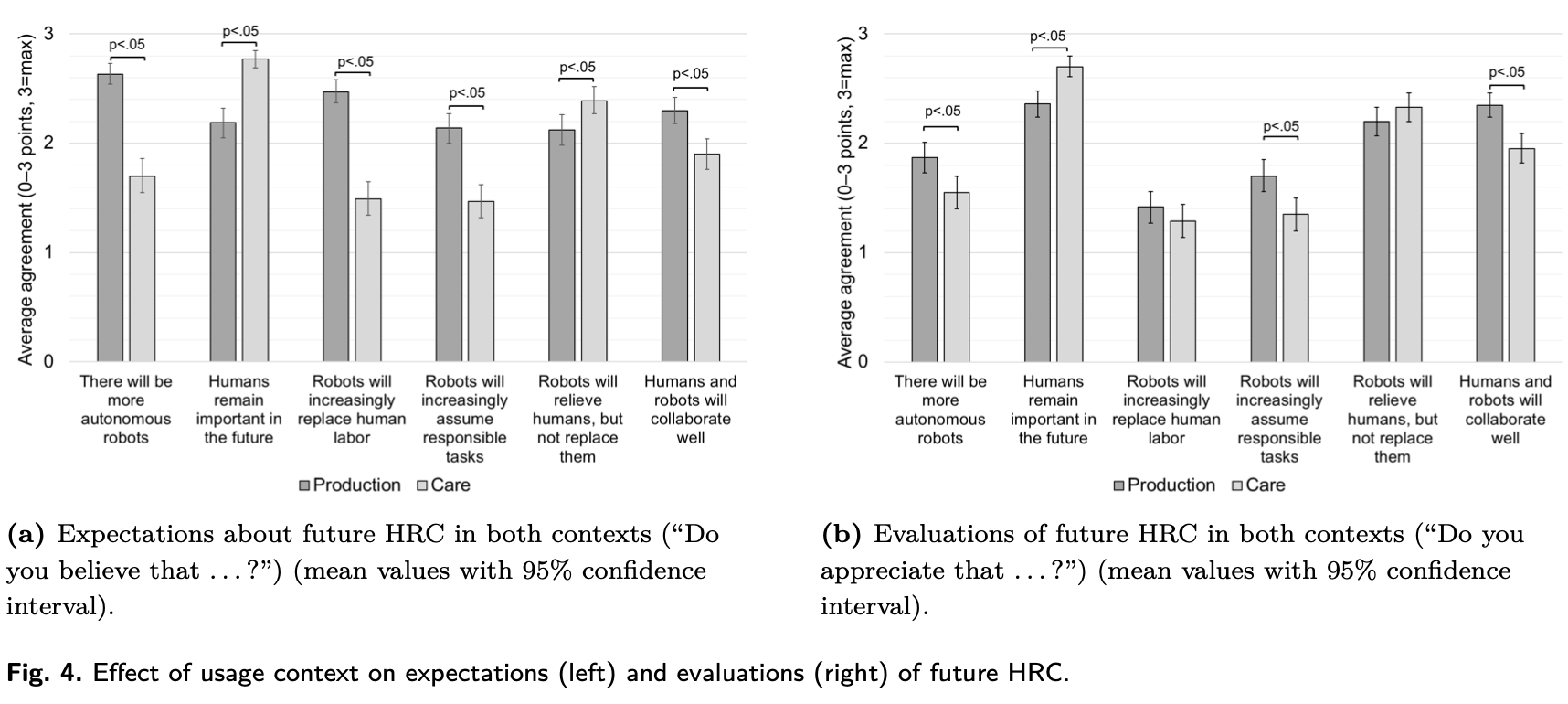
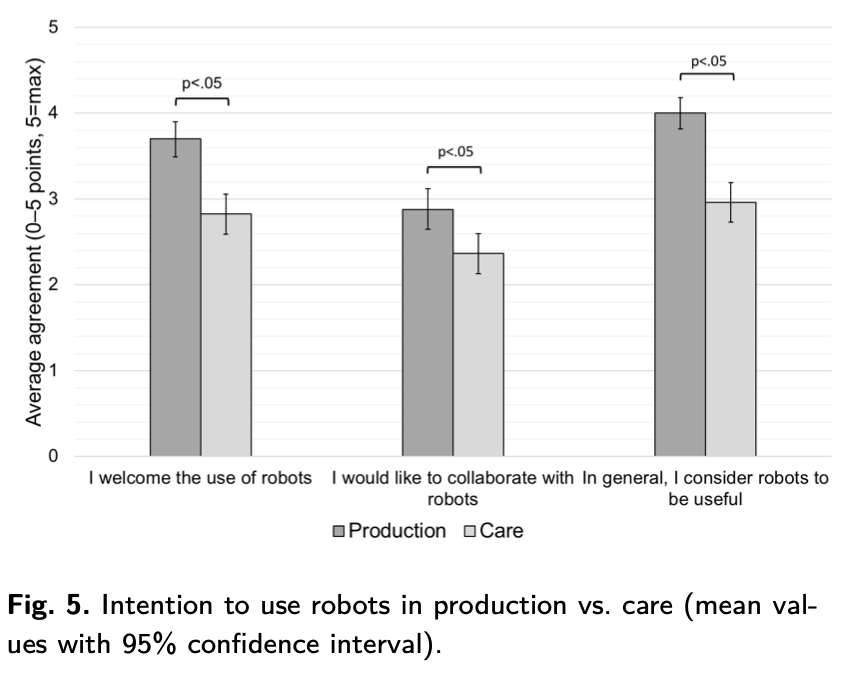
The results of a scenario-based survey with $N=228$ participants showed a higher willingness to collaborate with production robots compared to care.
Context and design influenced the trust attributed to the robots: Robots with a technical appearance in production were trusted more than anthropomorphic robots or robots in the care context.
The evaluation of attributions by means of a semantic differential showed that differences in robot design were less pronounced for the production context in comparison to the care context. In the latter, anthropomorphic robots were associated with positive attributes.
The results contribute to a better understanding of the complex nature of trust in automation. They can be used to identify and shape use case specific risk perceptions as well as perceived opportunities to interacting with collaborative robots.
Findings of this study are pertinent to research (e.g., experts in human-robot interaction) and industry with special regard given to the technical development and design.
This article explores the impact of design factors of the robotic interface (anthropomorphic vs. functional) and usage context (production vs. care) on human-robot trust and attributions.
The results of a scenario-based survey with $N=228$ participants showed a higher willingness to collaborate with production robots compared to care.
Context and design influenced the trust attributed to the robots: Robots with a technical appearance in production were trusted more than anthropomorphic robots or robots in the care context.
The evaluation of attributions by means of a semantic differential showed that differences in robot design were less pronounced for the production context in comparison to the care context. In the latter, anthropomorphic robots were associated with positive attributes.
The results contribute to a better understanding of the complex nature of trust in automation. They can be used to identify and shape use case specific risk perceptions as well as perceived opportunities to interacting with collaborative robots.
Findings of this study are pertinent to research (e.g., experts in human-robot interaction) and industry with special regard given to the technical development and design.
Biermann, H., Brauner, P., & Ziefle, M. (2021). How context and design shape human-robot trust and attributions, Paladyn, Journal of Behavioral Robotics, 12(1), 74-86. doi: https://doi.org/10.1515/pjbr-2021-0008
Related Project(s):
Figures and Tables (selection):